In the world of robotics, enthusiasts and creators often embark on a quest to build their own mechanical marvels while keeping expenses in check. Markwtech, a dedicated do-it-yourself (DIY) engineer with a fervor for engineering, woodworking, and music, embodies this spirit with his thrifty hexapod robot endeavor. Drawing inspiration from the PhantomX AX, a high-priced creation by Trossen Robotics commanding a formidable $1300, Markwtech set out on an odyssey to construct his hexapod robot utilizing cost-effective components, the power of 3D printing, and a generous sprinkle of innovation. In this article, we will delve into Markwtech's project, taking a closer look at the design, materials, and electronic components employed to bring this impressive hexapod to life on a shoestring budget.
https://markwtech.com/robots/hexapod/
Design and 3D Printing
Markwtech harnessed the capabilities of Autodesk Fusion 360, a versatile 3D modeling software, to craft the blueprint of his hexapod robot. He brought this design to fruition by fabricating the parts through his trusty Creality CR-10S 3D printer. The components, meticulously conceived to strike a balance between lightweight construction and structural integrity, feature slender walls and strategic lightening holes. In his quest for efficiency, Markwtech opted for black PLA filament and cranked up the printing temperature slightly to 210°C, resulting in enhanced layer-to-layer adhesion and increased part durability. The hexapod's design incorporates an array of components, including a body bottom plate, body risers, femur brackets, servo bearing centers, tibia base plates, and more. All of these elements are printed with a 30% infill, a decision made with a watchful eye on cost management, estimating the total filament expenditure at less than $10.
Assembly and Hardware
To piece together the hexapod, a diverse collection of screws, nuts, and bearings is essential. Markwtech took advantage of 3/8", 1/2", and 5/8" 4-40 machine screws and nuts, along with 1/4" #2 screws sourced from McMaster-Carr, to securely fasten the various components. What makes this assembly process intriguing is Markwtech's unconventional approach—he found that screws could be effectively employed without the need to tap holes in plastic parts, with an electric drill-driver making this operation a breeze. This pragmatic approach simplifies the assembly process and obviates the requirement for specialized tools. Achieving precise servo alignment is pivotal, and Markwtech insists on ensuring that the servos are impeccably centered (set to 90 degrees) before they are attached and incorporated into the leg components. The 'select' button on the PS2 controller provides a user-friendly means of configuring the servo outputs to the desired 90-degree position.
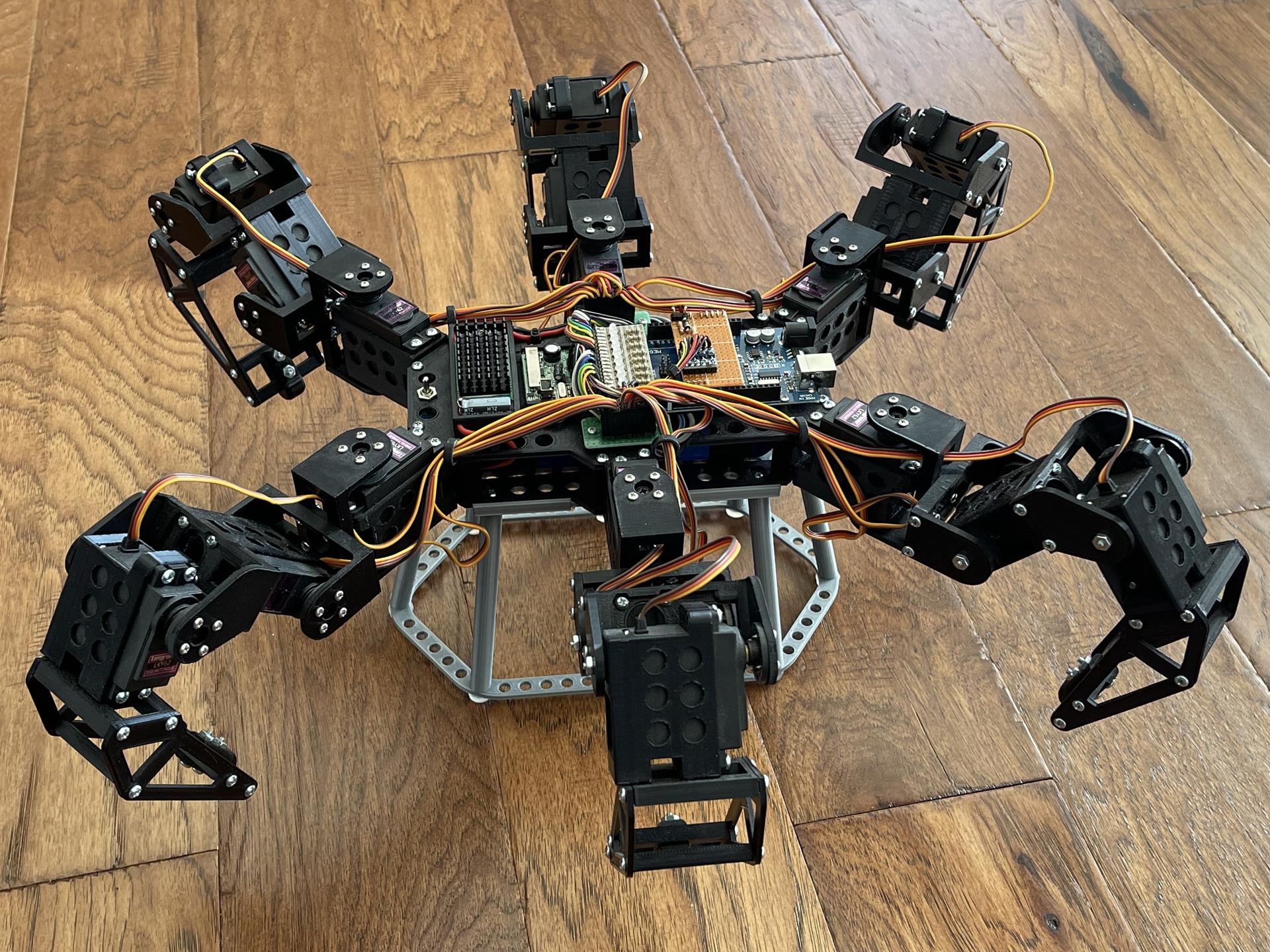
Electronics
The electronic core of the hexapod involves a suite of fundamental components:
Mega 2560 processor board: Markwtech opted for an Arduino clone as the central processing unit of the robot.
20A HV SBEC: A high-voltage switched-mode regulator was enlisted to power the servos, with the unit undergoing a transformation as it was securely mounted within a 3D-printed base.
PS2 wireless controller and receiver: Standard PS2 wireless controllers were instrumental for remote operation, with the added sophistication of interfacing with an Arduino library.
LiPo battery: A 5000mAh 3S 20C LiPo battery was entrusted with providing the necessary power to fuel the hexapod's operations.
Bi-directional level converter: This pivotal component was tasked with bridging the voltage divide between the Arduino and the PS2 receiver, ensuring seamless compatibility.
Markwtech's electronics setup also incorporated perfboards for servo headers and an LED status display board, showcasing both organization and functionality.
Software and Gait Patterns
At the heart of the hexapod's functionality lies its software, which serves as the brain orchestrating its movements. Markwtech harnessed inverse kinematics (IK) calculations to empower the robot to discern the requisite servo angles based on the desired positions of its feet across x, y, and z coordinates. Each of the six legs is designed with unique angles and offsets, leading to variations in the coxa angle for each leg.The hexapod boasts an array of gait patterns, encompassing tripod, wave, ripple, and tetrapod gaits. These distinctive patterns delineate the leg movements required to achieve diverse forms of locomotion. For instance, the tripod gait involves three legs progressing forward while the remaining trio serves as a stabilizing force. Control of the hexapod falls into the capable hands of a conventional PS2 wireless controller, with Markwtech making select modifications to the PS2X library to ensure seamless compatibility. He meticulously mapped control functions to the buttons on the controller, resulting in intuitive and user-friendly operation.
Parts List
